| Herkunftsort: | China |
|---|---|
| Markenname: | UWC |
| Modellnummer: | UWC3500 |
| Min Bestellmenge: | 1 |
| Preis: | Discussible |
| Verpackung Informationen: | Zettelkasten |
| Lieferzeit: | 3 Arbeitstage |
| Zahlungsbedingungen: | T/T |
| Versorgungsmaterial-Fähigkeit: | 100 pro Monat |
| API-Operationszeit: | 0.43ms | Eingangsleistungsspannung: | 24VDC |
|---|---|---|---|
| Spannungsertrag der Hilfshydraulik 12V: | 12.05VDC | Präsident- des Bundesrechnungshofesinput/output: | 2 / 2 |
| Extern im Input/Output (unter Verwendung einer RS232 Kommunikationsschnittstelle): | 24/24 | ||
| Markieren: | Visionsmaßsystem,Messverfahren der Vision |
||
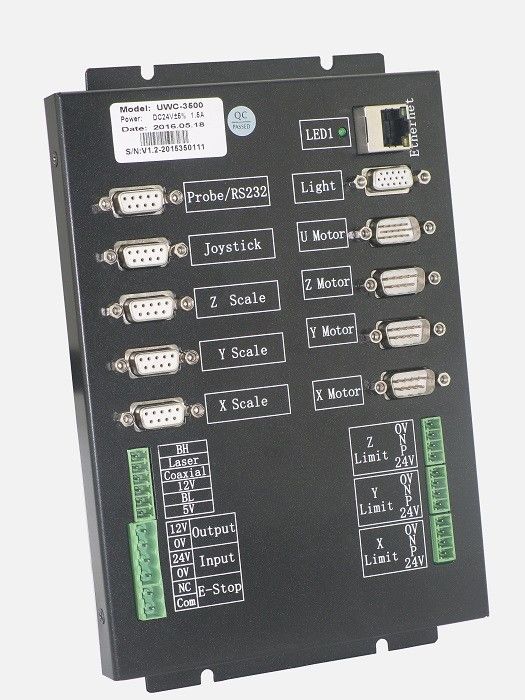
Einleitung
UWC 3500 ist ein allgemeiner voller geschlossener Prüfer mit 4 Achsen, benutzt in der Visionsmaßmaschine und zusammengesetzte Visionsmaßmaschine oder Messverfahren der Automatisierung. Mit dem linearen geschlossenen Positionsfeedback des Skala- oder Bewegungskodierers ist das UWC3500 in der Lage, hohe Genauigkeit zu erzielen.
Eigenschaften:
1. Moderne obere und unterere Maschinenstruktur, Hochleistung CPU+FPGA
2. Kommunikation: Ethernet-Schnittstelle, die Laufzeit für eine einzelne API-Funktion ist niedriger als 0.45ms.
3. Direction+Pulse Steuermodus, fähig, zu den Schrittmotoren zu steuern, Wechselstrom-Servo, lineares Servo oder DDM, etc.
4. Volle geschlossene Bewegungssteuerung, Lokalisierung der hohen Genauigkeit, die schnell stabil ist, genau, und. Moderner geschlossener Steueralgorithmus und sehr wenige PID-Parameter, stellen das einfache Drehen für die Benutzer sicher.
5. S-Art die planierende Geschwindigkeitskurve, das s-Abschnittverhältnis im Verlangsamungsprozeß kann eingestellt werden.
6. Lokalisieren von Strategie:
Pulse+directions-Steuerung.
Lineare geschlossene Steuerung des Skala-/Kodiererpositionsfeedbacks, PID+VFF verbesserte den Algorithmus und beseitigte das null Verschiebungsproblem.
7. Bewegungsmodus:
Punkt-zu-Punkt-, STOSS-Modus, automatisch ansteuernder Modus, der bedienungsfreundlich und flexibel ist, lineare Interpolation von 2 Achse oder 3 Achse, horizontale Bogeninterpolation, Notensonde und Steuerknüppelmodus.
8. Sicherheitspolitik:
Selbstjustagefunktion der Maschine, die, die Grenz-Logik und -richtung automatisch einstellend, die Bewegungsparameter und lineare die Feedbackrichtung sich dreht, stellen sicher, um den Feedbackbewegungsfehler zu beseitigen.
Wenn die Achsenbewegung nah an der Grenze dort eine Vorverlangsamung ist und bevor sie automatisch ansteuert, gibt es gezwungene Beschränkung der beweglichen Geschwindigkeit.
Software-Grenze stützte sich.
9. Die API-Funktion verwendet die Verkapselung, die den Gegenstand gegenüberstellt, der die einfache Programmierung anbietet. Die meisten Parameter werden durch ausprüfen Software eingestellt.
10. Hohe Integration, Hochleistung, stabile und einfache Produktion und Wartung.
11. Das UWC-3500 setzt SMT-Fertigungstechnik ein, stellt Stabilität und Zuverlässigkeit sicher.
12. Mit hoher Flexibilität fertigen der Sitz UWC3500 für die nichtstandardisierte Ausrüstung und auch von der Funktion ist verfügbar besonders an.
13. Das UWC3500 stützt die on-line-Mikroprogrammaufstellung, die Funktion aktualisieren, Benutzer müssen den Prüfer nicht von der Maschine entfernen, einfach, die Funktion zu aktualisieren und zu erweitern, den sich entwickelnden und Drehenzyklus der Ausrüstung zu verkürzen.
14. Externes Modul UWC348 IO, maximal für 26 in 26 heraus.
15. Die Position, die zusammenpassende Funktion vergleicht, die genau zusammengebracht werden kann, auch Benutzer kann die Strecke des zusammenpassenden Auslösers einstellen, kann der auslösende Ertrag an die Kamera oder Laser-Sensor angeschlossen werden.
16. Betriebs-stroboflash Lichtquellekontrollfunktion und zusammenpassende Funktion CCD-Position Trigger.
17. Starke Ausprüfensoftware eingeschlossen, einfache Operation, einfach, damit Benutzer die Maschine drehen.
Parameter
| Einzelteil | Min. | Typisch | Maximum. | Einheit |
| API-Operationszeit | 0,425 | 0,43 | 0,45 | Frau |
| Eingangsleistungsspannung | 22,5 | 24 | 26 | VDC |
| Spannungsertrag der Hilfshydraulik 12V | 11,76 | 12,05 | 12,24 | VDC |
| zusätzlicher Ertrag des Starkstroms 12V | 0 | 2,0 | 2,5 | |
| Spannungsertrag der Energie 5V | 5,1 | 5,2 | 5,25 | VDC |
| Ertrag des Starkstroms 5V | 0 | 1,8 | 2,0 | |
| Ladende Fähigkeit der X-/Y/Zbewegungsschnittstelle 24V | 0 | 3,0 | 4,0 | |
| Richtungsimpulsfrequenz | - | - | 6,5 | MHZ |
| Frequenzentschließung | 0,006 | - | - | Hz |
| Lineare Skala, die Strecke zählt | - 2147483648 | - | 2147483647 | CNTs |
| Richtungsimpuls, der Strecke zählt | - 2147483648 | - | 2147483647 | CNTs |
| Geschwindigkeit, die Niveau justiert | - | - | 1.000.000.000 | DDS 32bit |
| Lineare Skalaentschließung stützte sich | -0,01 | - | 10000 | um |
| Lineare Skalasignalausgabefrequenz | - | - | 6,5 | MHZ |
| Präsident- des Bundesrechnungshofesinput/output | - | - | - | Anschluss |
| Hochgeschwindigkeits-RS232 Kommunikationsschnittstelle | - | 2 | - | Anschluss |
| Extern im Input/Output (unter Verwendung einer RS232 Kommunikationsschnittstelle) | - | 24/24 | - | Anschluss |
| Ansteuerungsstromertrag des Schrittes | 0,07 | - | 1,15 | (EFFEKTIVWERT) |
| Schritt, der Unterteilung fährt | 16 | 16 | 16 |
|
Spezifikation
| NEIN. | Spezifikation | UWC3500 |
|
| 1 | Mpower-Versorgung | DC24V@2A-Input, gab DC12V@2A aus (Versorgung CCD-Energie) |
|
| 2 | Messende Software-Kompatibilität | Voll kompatibel zu V1.4 |
|
| 3 | Maß | 255 * 118 * 53 (Millimeter) |
|
| 4 | Kommunikation | Lokalisiertes USB oder Ethernet (optional) |
|
| 5 | geschlossene Steuerpolitik | Totzone PID+VFF+ |
|
| 6 | Servo Bildwiedeholfrequenz | 2.5KHz |
|
| 7 | Anti-mechanischer Schock, Geschwindigkeit optimieren | INTELLIGENTER Modus | |
| 8 | Achse der linearen Wandlerzählung | 3 | |
| 9 | Grundlegendes Steuerachse | 4 | |
| 10 | Achsenverbrauchen | Fähig, Achse pulse+direction zu addieren 3 | |
| 11 | XYZ-Achsensteuermodus | Impuls + Richtung RS422 | |
| 12 | XYZ-Achse stützte Bewegungsart (mit externem Lokführer) | Step-/ACservo/lineares servo-/DCservo mit Kodiererfeedback | |
| 13 | U-Achsensteuermodus A | RS232 schließen an das Selbstzoomobjektiv Pomeas an | |
| 14 | U-Achsensteuermodus B | 2 Phasen treten Fahrer wird eingebettet, die das Selbstzoomobjektiv mit Schrittmotoren stützen, einzeln/Duo, die Grenzen gestützt werden. | |
| 15 | Geschwindigkeitskurvenplanung | Ladder-/Sart | |
| 16 | Interpolation | Lineare Interpolation der multi Achse, Bogeninterpolation mit 2 Achsen, Interpolation mit 3 Achsen |
|
| 17 | Frequenz Max. Pulse | 5MHz | |
| 18 | Impulsfrequenzentschließung | 0.001Hz | |
| 19 | Geschwindigkeit, die Niveau justiert | 1.000.000.000 | |
| 20 | Analoge Spannungsregelung | - | |
| 21 | Linearer Wandler, der Frequenz zählt | 6MHz/(a- oder b-Phase) | |
| 22 | Lineare Wandlersignaldefinition | R oder S für optionales (R: 12345, S: 26789) | |
| 23 | Messende Hardware der Sonde | Notensonden-Schnittstellenleitung | |
| 24 | Sondenfehler, der Stromkreis verarbeitet | Verfügbar, Autoreparatur der nonhoming Sonde | |
| 25 | Kompatible Sonde | Renishaw/Tesa alle Reihentriggernotensonde | |
| 26 | Sondenverarbeitungsmodul | Sondenhochgeschwindigkeitsklinke, Steuerknüppelsteuernotenpunktselbstpause und Selbstrückzug, Selbstentdeckungspunktmodus | |
| 27 | Steuerknüppelsignal, welches die Karte eingebettet sammelt | 12 gebissene Entschließung, Input der Analogspannung 0-5V, 3 Druckknopf und 3 LED, Notausschalter umfassten, Geschwindigkeitseinstellknopf einschließlich (gegenseitig - das Exklusive verwendet mit Knopf 3#) | |
| 28 | Eingebettete BeleuchtungsSteuerkarte | 8 Abschnitthelles + unteres helles + Koaxialoberflächenlicht, Software-Justage des Niveaus 0-200 | |
| 29 | Beleuchten von Gradeinstellungsfunktion | waagerecht ausgerichtete Hardware 16, die in der Parametereinstellungsbasis auf der Helligkeitsanforderung justiert | |
| 30 | Banksteuerung der Konturnlichtregelungsfähigkeit/LED | Max. 420mA, Sitz für die meisten der großen Reisemaschine | |
| 31 | Externe schwierige Art Beleuchtungsschnittstelle | Fähig, an 5 programmierbares erhöhtes/drehbares Licht des programmierbaren Lichtes des Lichtes des Abschnitts der Ringe 8 anzuschließen einzelne Farboder 5 des Abschnitts 4 der Ringe 8 Farb, | |
| 32 | Allgemeine Input-/Outputschnittstelle | Abschnitt 8 lokalisierte Input, Ertrag 5 (ULN2803 kompatibel) | |
| 33 | Systemuhr | Jahr-Monat-Tag-Stunde-Minute-zweites, können nicht geändert werden | |
| 34 | Mikroprogrammaufstellungsverbesserung | Kundenverbesserung auf Standort, anbietender schneller Lösung und der technischen Aktualisierung. | |
| 35 | Sondenverbindungsstück | 9 Verbindungsstück des Stift D-DUB, einfacheres für das Verdrahten und stabiler | |
| 36 | Steuerknüppelverbindungsstück | OTP6, OTP7, HC3 (Multi-Schlüsselsteuerknüppel) | |
| 37 | Steuerknüppeldatenverarbeitung | Der des Kontrolleures Prozess innerlich die Steuerknüppeldaten- und -bewegungssteuerung, gegenseitig mit dem anderen Bewegungssteuermodus, der Steuerknüppelsonde, die mit Selbsthalt sich berühren und Selbstrückzug | |
| 38 | Externe Notaus | Der Notausknopf steuert das Leistungsstärkespg.versorgungsteil | |
| 39 | Geschwindigkeitskurvenplanung | Art der Leiter/S | |
| 40 | Software-Begrenzungsschalter | Verfügbar | |
| 41 | Software-Verlangsamungspunkt | Verfügbar | |
| 42 | Festgesetztes Abstandsbremsen | Verfügbar | |
| 43 | Gestützte Ausprüfensoftware | Version V4.0 oder oben (Selbstentdeckungsund Einstellungsparameter) |